
Устройство синхронного двигателя

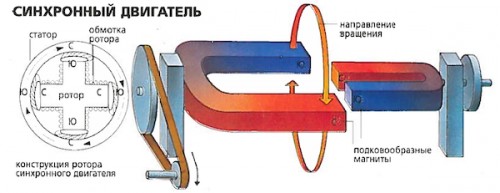
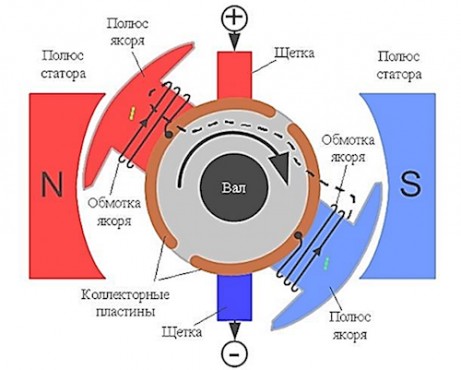
Все электродвигатели построены на одном и том же принципе взаимодействия магнитных полей. Катушка с сердечником из ферромагнитного материала оказывает заметное механическое воздействие на другую аналогичную катушку. Разноименные полюсы соленоидов притягиваются, а одноименные — отталкиваются.
Поэтому в двигателе должно быть пространственное перемещение полюсов магнитного поля, создаваемое одной его частью. А другая часть движка создает свои полюсы и откликается вращением на пространственное перемещение полюсов. Она может содержать как постоянные магниты, так и катушки с сердечником. Далее расскажем о том, как магнитные поля функционируют в синхронных двигателях, а также предоставим другую информацию об этих машинах.
Конструктивные особенности
Синхронный двигатель содержит
- часть конструкции, в которой создается перемещающееся магнитное поле, называемую статором;
- часть двигателя, которая вращается от воздействия магнитного поля, называемую ротором;
- провод, соединяющий движок с источником питания, который сравнивают с якорной цепью корабля. Чтобы указать на ту часть двигателя, которая присоединена к проводу, ее называют якорем. В рассматриваемой машине питающий провод присоединен к статору. Следовательно, это якорь.

Чем больше витков содержат взаимодействующие катушки, тем меньший ток потребуется для эффективной работы движка. Но сила тока — это не самая сложная проблема. Главное — создать пространственное перемещение магнитного поля, что весьма непросто.
По этой причине синхронный двигатель появился только после того, как заработал первый генератор. Его создал в 1891 г. М.О. Доливо-Добровольский. Обратимость электрических машин позволяет использовать их и генераторами, и двигателями. Обратима и синхронная машина. Но для движков существуют определенные конструктивные ограничения, которых нет у генераторов.
Принцип работы
Для получения направления вращения статор двигателя должен содержать как минимум две катушки. Только в такой конструкции можно создать направленное перемещение магнитного поля. Это определяет устройство и принцип работы многих электродвигателей, питаемых от сети. Для нормальной работы синхронной машины, если это генератор, статор может содержать только одну катушку и быть источником ЭДС. Его ротор вращается принудительно. При этом, независимо от направления вращения, на клеммах статора появится переменное напряжение.
Но если такой генератор используется как двигатель, направление вращения его ротора может быть в обе стороны.
Оно будет определяться
- либо положением ротора в момент подачи напряжения на клеммы статора;
- либо принудительно направлением стартового вращения.
Конструкцию большинства электрических машин в основном определяет система электроснабжения, с которой они связаны. В наши дни первичными источниками ЭДС являются трехфазные генераторы. Эти машины создают трехфазное напряжение. Оно позволяет непосредственно получать перемещающееся магнитное поле. Без него синхронные двигатели переменного тока не могут работать, так же, как и асинхронные движки.
Для этого используются три или две фазы, питающие обмотки статора движка. Устройство синхронного двигателя должно соответствовать схеме электропитания. Наилучший результат получается при трехфазной конструкции статора. В этом случае магнитное поле получается вращающимся. По этой причине трехфазный синхронный двигатель является наиболее эффективным, если его сравнивать с аналогами, но при меньшем числе фаз.
Электромагнитные процессы и вращение
Намагниченный ротор тянется за полем статора и поэтому вращается синхронно с ним. В этом и состоит принцип действия синхронного двигателя. Магнитный поток в теле ротора в основном определяет крутящий момент на вале движка. Чем больше магнитный поток, тем больше крутящий момент. При этом независимо от нагрузки на вал (в определенных пределах) его скорость вращения не изменяется. Меняется только взаимное положение полей статора и ротора, но не скорости вращения.
По мере увеличения нагрузки на вал полюсы ротора оказываются все больше позади поля статора. Число n оборотов в минуту ротора рассматриваемого двигателя зависит от того, сколько пар полюсов p у статора. Если он запитан переменным напряжением с частотой f , используется формула

В результате изменения положения ротора под нагрузкой уменьшается магнитный поток в сердечнике статора. Вследствие этого ток статора увеличивается и компенсирует уменьшение магнитного потока, противодействуя нагрузке на вале движка. Аналогичные процессы происходят в нагружаемом трансформаторе. Полюсы статора и ротора все больше удаляются друг от друга по мере увеличения нагрузки. Но частота оборотов остается неизменной до определенного момента.
Как только электромагнитные параметры конструкции статора оказываются меньше некоторого предельного значения, ротор останавливается. Время до полной остановки определяет привод, использующий синхронный электродвигатель. Конструкция ротора без специальных технических решений не позволяет получить крутящий момент за счет скольжения, как в асинхронном двигателе. То же самое получится, когда синхронные двигатели запускаются — скольжение отсутствует.
Но конструкция, в которой много пар полюсов и медленное вращение ротора, может быть исключением. На самостоятельный пуск движка влияет масса ротора и скорость перемещения поля статора мимо ротора. Обычно сила их взаимодействия может преодолеть инерцию ротора. Но после принудительной раскрутки тем или иным способом. Только при этих стартовых условиях возможна работа синхронного двигателя. Начальная скорость для входа в синхронизм обычно близка к параметрам вращающегося магнитного поля статора.
Разновидности движков
Конструкция ротора и принцип действия синхронной машины-двигателя напрямую связана
- с мощностью, которую надо создать на его вале,
- необходимой для этого величиной магнитного потока,
- параметрами напряжения питания статора.
Устройство синхронных машин небольшой мощности получается более простым при изготовлении магнитного ротора из специальных материалов. Так же применяется явно полюсный ротор с малой начальной намагниченностью. В результате получаются конструкции с постоянными магнитами, а также гистерезисные и синхронные реактивные двигатели. На статор этих движков подается переменное напряжение. Число фаз и частота соответствуют конструкции двигателя. В однофазных движках может быть использован конденсатор, через который подключается одна из двух обмоток статора. Но может быть применена схема из показанных далее вариантов.







Гистерезисный движок похож на синхронный реактивный двигатель. Эти синхронные машины переменного тока характеризует одинаковый принцип действия. Его определяет магнитное поле статора, намагничивающее ротор. Гистерезисный движок и синхронный реактивный электродвигатель своей надежностью не уступают асинхронным двигателям. Однако роторы этих синхронных машин всегда бывают существенно дороже роторов асинхронных движков.
С целью получения максимального силового взаимодействия и больших по величине крутящих моментов в роторе используется принцип электромагнита. При этом его называют индуктором с обмоткой возбуждения. Для ее питания применяется постоянное напряжение, которое подается на щетки. Они расположены на статоре и скользят по кольцам, установленным на роторе. Через эту пару скользящих контактов течет постоянный ток возбуждения.

Такое классическое устройство синхронной машины существует и в наши дни, но преимущественно в наиболее мощных моделях. Для запуска движков обычно используются конструктивные решения со скольжением магнитных полей, характерные для асинхронных двигателей. При наличии индуктора для этого достаточно накоротко замкнуть щетки. В синхронных электрических машинах движки без щеток в роторе делаются с пусковыми обмотками типа беличьей клетки. Могут быть иные конструктивные решения для асинхронного старта.
Важной особенностью рассматриваемых двигателей, питаемых переменным напряжением, является их польза при работе без механической нагрузки или при ее небольшой величине. В таком режиме работы при небольшом возбуждении реактивная мощность из сети потребляется, а при значительном — отдается в сеть. Тем самым увеличивается эффективность электроснабжения. Для этой цели делаются специальные движки, называемые синхронными компенсаторами.

Развитие полупроводниковых приборов позволило создавать вращающееся магнитное поле путем преобразования постоянного напряжения. Очевидно то, что такое техническое решение расширило возможности управления электрическими двигателями. Регулирование частоты питающего напряжения и бесконтактный индуктор — это главные достижения полупроводниковых моделей. Но при этом существуют ограничения, определяемые возможностями электронных ключей.
По этой причине наиболее мощные из всех существующих движков по-прежнему являются трехфазными индукторными конструкциями со щетками и кольцами.
Принцип действия синхронного двигателя
Прежде чем рассматривать принцип действия синхронного двигателя, необходимо помнить, что это электрическая машина, работающая на переменном токе, у которой ротор вращается с частотой, которая равна частоте вращения магнитного поля в воздушной прослойке.
Синхронный двигатель состоит из основных частей – якоря и индуктора. Обычно, его исполнение сделано таким образом, что якорь расположен на статоре, а индуктор – на роторе, отделенном воздушной прослойкой. Данные агрегаты обладают высоким коэффициентом мощности. Существенным плюсом является возможность их использования в сетях с любым напряжением.
Устройство синхронного двигателя
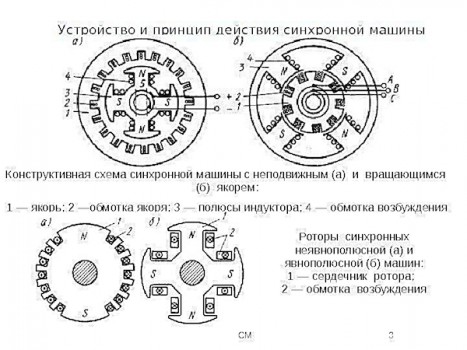
Конструкция синхронного двигателя состоит из двух основных частей – статора и ротора. Статор является неподвижной частью агрегата, а ротор – подвижной. В состав якоря входят одна или несколько обмоток переменного тока. При работе двигателя токи, поступающие в якорь, приводят к вращению магнитного поля, пересекающегося с полем индуктора и преобразующего энергию. Поле якоря носит другое название – поле реакции якоря. В генераторе такое поле создается с помощью индуктора.
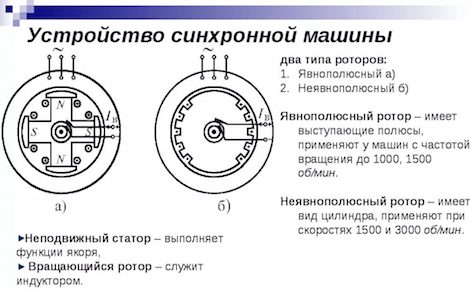
В состав индуктора входят электромагниты постоянного тока, называемые полюсами. Во всех синхронных электродвигателях индукторы бывают двух конструкций – явнополюсная и не явнополюсная, отличающиеся расположением полюсов. Конструкция статора включает в себя корпус и сердечник, в состав которого входят двух- и трехфазные обмотки. Сами обмотки могут быть распределенными и сосредоточенными.
Чтобы уменьшить магнитное сопротивление и улучшить прохождение магнитного потока, используются ферромагнитные сердечники, расположенные в роторе и статоре, для изготовления которых используется электротехническая сталь. Она обладает интересными свойствами, например, повышенным содержанием кремния, с целью повышения ее электрического сопротивления и уменьшения вихревых токов.
Каждый синхронный электродвигатель обладает важным параметром – электромагнитным моментом. Он возникает в том случае, когда магнитный поток ротора начинает взаимодействовать с вращающимся магнитным полем. Данное поле образуется под влиянием трехфазного тока, протекающего по обмотке якоря.
В режиме холостого хода происходит совпадение осей магнитных полей ротора и статора. Поэтому электромагнитные силы, возникающие между их полюсами, принимают радиальное направление и значение электромагнитного момента агрегата становится равным нулю. При переходе устройства в двигательный режим, на ротор начинает воздействовать внешние нагрузочный момент, приложенный к валу. В результате, происходит смещение ротора на величину определенного угла против направления вращения.

Подобное электромагнитное взаимодействие между ротором и статором приводит к созданию электромагнитных сил, направленных в сторону вращения. Таким образом, действие вращающегося электромагнитного момента стремится к преодолению действия внешнего момента. Максимальное значение электромагнитного момента образует угол 90 градусов, при расположении полюсов ротора между осями полюсов статора.
Если значение нагрузочного момента, приложенного к валу двигателя, превысит максимальный электромагнитный момент, в этом случае двигатель остановится под влиянием внешнего момента. Из-за этого в неподвижном двигателе по обмотке якоря будет проходить очень высокий ток. Данный режим является аварийным, он представляет собой выпадение из синхронизма и на практике не должен допускаться.
Как работает синхронный двигатель
Принцип действия синхронного двигателя основывается на взаимном влиянии магнитных полей якоря и полюсов индуктора. При обращенной конструкции агрегата расположение якоря и индуктора выполнено наоборот, то есть, первый расположен на роторе, а другой – на статоре. Такой вариант используют криогенные синхронные машины, у которых в состав обмоток возбуждения входят материалы со свойствами сверхпроводимости.
При запуске двигателя его разгоняют до частоты близкой к той, с которой в зазоре вращается магнитное поле. Только после этого он переходит в синхронный режим. В данной ситуации происходит пересечение магнитных полей якоря и индуктора. Этот момент получил название входа в синхронизацию.
При разгоне используется состояние асинхронного режима, когда происходит замыкание обмоток индуктора с помощью реостата или короткозамкнутым путем, подобно асинхронным машинам. Для того, чтобы осуществлять запуск в таком режиме, ротор оснащается короткозамкнутой обмоткой, которая одновременно является успокоительной обмоткой, способной устранить раскачивание ротора во время синхронизации. После того, как скорость становится близко к номинальной, в индуктор подается постоянный ток.
Таким образом, синхронный двигатель это не только двигатель, но и своеобразный генератор, поскольку у них одинаковое конструктивное исполнение. Схема работы двигателя будет следующей. Обмотка якоря подключается к трехфазному переменному току, а к обмотке возбуждения от постороннего источника подается постоянный ток. Вращающееся магнитное поле, созданное трехфазной обмоткой и поле, созданное обмоткой возбуждения, взаимодействуют между собой. Это вызывает появление электромагнитного момента, приводящего ротор во вращающееся состояние.
Для двигателей, где установлены постоянные магниты, применяются специальные внешние разгонные двигатели. В отличие от асинхронных устройств, разгон ротора в синхронном двигателе должен достигнуть частоты вращения магнитного поля. Это связано с подачей в обмотку ротора тока из постороннего источника, а не индуцируется в нем под действием магнитного поля статора, следовательно, на него не влияет частота вращения вала. В результате, синхронный двигатель переменного тока приобретает постоянную частоту вращения ротора вне зависимости от нагрузки. Специфический принцип работы этих устройств оказал влияние на их пуск и регулировку частоты вращения.
Схема запуска двигателя и его регулировка
У синхронных двигателей отсутствует начальный пусковой момент. При подключении якорной обмотки к источнику переменного тока, электромагнитный момент дважды изменить свое направление за один период изменения тока. Это происходит, когда ротор находится в неподвижном состоянии, а в обмотке возбуждения протекает постоянный ток.
Таким образом, величина среднего момента в течение одного периода будет иметь нулевое значение. Чтобы увидеть, как работает синхронный двигатель при пуске, нужно выполнить разгон его ротора под действием внешнего момента до вращения с частотой, приближенной к синхронной.
Сам запуск агрегата может производиться разными способами:
- В первом случае используется схема асинхронного включения, основой которой служит глухо подключенный возбудитель. Данный способ применяется при статическом моменте нагрузки ниже 0,4, когда отсутствует падение напряжения. Сопротивление разряда замыкается в обмотке возбуждения, за счет чего исключаются перебои с возбуждением обмотки во время впуска, поскольку незначительная скорость вращения ротора приводит к перенапряжению. Когда скорость становится близкой к синхронной, контактор реагирует на это изменение, в результате происходит переключение обмотки возбуждения из разрядного сопротивления непосредственно на якорь возбудителя.
- Во втором варианте пуска используется тиристорный возбудитель. Этот способ считается более надежным из-за высокого КПД. Управление возбуждением значительно облегчается. Подача возбуждение осуществляется автоматически с помощью электромагнитного реле.
Различия синхронных и асинхронных двигателей
Все электродвигатели переменного тока по принципу действия могут быть асинхронными и синхронными. В первом случае вращение ротора будет медленнее, по сравнению с магнитным полем, а во втором – вращение ротора и магнитного поля происходит с одинаковой скоростью.
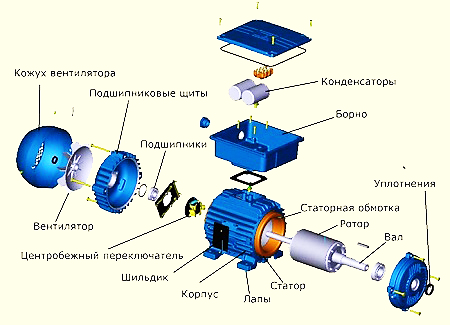
В асинхронном двигателе вращающееся переменное магнитное поле создается обмотками, закрепленными на статоре. Концы этих обмоток выведены в общую клеммную коробку. Во избежание перегрева на валу двигателя устанавливается вентилятор. Ротор выполнен из металлических стержней, замкнутых с двух сторон между собой. Он представляет единое целое с валом и получил название короткозамкнутого ротора.
Вращение магнитного поля происходит под действием постоянной смены полюсов. Соответственно, в обмотках изменяется направление тока. На скорость вращения вала оказывает влияние количество полюсов магнитного поля.

Синхронный электродвигатель конструктивно отличается от асинхронных агрегатов. Здесь вращение ротора и магнитного поля происходит с одинаковой скоростью. Напряжение на ротор для зарядки обмоток подается с помощью щеток, а не индуцируется действием переменного магнитного поля. Направление тока в обмотках изменяется одновременно с направлением магнитного поля, поэтому вал синхронного двигателя всегда вращается в одну сторону.
Что такое синхронный двигатель и где он используется
Синхронные электродвигатели (СД) не так распространены, как асинхронные с короткозамкнутым ротором. Но используются там, где нужен большой крутящий момент и в процессе работы будут происходить частые перегрузки. Также такой тип двигателей используются там, где нужна большая мощность, чтобы приводить в движение механизмы, благодаря высокому коэффициенту мощности и возможности улучшать коэффициент мощности сети, что существенно снизит затраты на электроэнергию и нагрузку на линии. Что такое синхронный двигатель, где он используется и какие у него плюсы минусы мы рассмотрим в этой статье.
Определение и принцип действия
Если говорить простым языком, то синхронным называют электродвигатель, у которого скорость вращения ротора (вала) совпадает со скоростью вращения магнитного поля статора.
Кратко рассмотрим принцип действия такого электродвигателя — он основан на взаимодействии вращающегося магнитного поля статора, которое обычно создаётся трёхфазным переменным током и постоянного магнитного поля ротора.
Постоянное магнитное поле ротора создаётся за счет обмотки возбуждения или постоянных магнитов. Ток в обмотках статора создаёт вращающееся магнитное поле, тогда как ротор в рабочем режиме представляет собой постоянный магнит, его полюса устремляются к противоположным полюсам магнитного поля статора. В результате ротор вращается синхронно с полем статора, что и является его основной особенностью.
Напомним, что у асинхронного электродвигателя скорость вращения МП статора и скорость вращения ротора отличаются на величину скольжения, а его механическая характеристика «горбатая» с пиком при критическом скольжении (ниже его номинальной скорости вращения).
Скорость, с которой вращается магнитное поле статора, может быть вычислена по следующему уравнению:
f – частота тока в обмотке, Гц, p – количество пар полюсов.
Соответственно по этой же формуле определяется скорость вращения вала синхронного двигателя.
Большинство электродвигателей переменного тока, используемых на производстве, выполнены без постоянных магнитов, а с обмоткой возбуждения, тогда как маломощные синхронные двигатели переменного тока выполняются с постоянными магнитами на роторе.
Ток к обмотке возбуждения подводится за счет колец и щеточного узла. В отличие от коллекторного электродвигателя, где для передачи тока вращающейся катушке используется коллектор (набор продольно расположенных пластин), на синхронном установлены кольца поперек одного из концов статора.

Источником постоянного тока возбуждения в настоящее время являются тиристорные возбудители, часто называемые «ВТЕ» (по названию одной из серий таких устройств отечественного производства). Ранее использовалась система возбуждения «генератор-двигатель», когда на одном валу с двигателем устанавливали генератор (он же возбудитель), который через резисторы подавал ток в обмотку возбуждения.
Ротор почти всех синхронных двигателей постоянного тока выполняется без обмотки возбуждения, а с постоянными магнитами, они хоть и похожи по принципу действия на СД переменного тока, но по способу подключения и управления ими очень сильно отличаются от классических трёхфазных машин.
Одной из основных характеристик электродвигателя является механическая характеристика. Она у синхронных электродвигателей приближена к прямой горизонтальной линии. Это значит, что нагрузка на валу не влияет на его обороты (пока не достигнет какой-то критической величины).

Это достигается именно благодаря возбуждению постоянным током, поэтому синхронный электродвигатель отлично поддерживает постоянные обороты при изменяющихся нагрузках, перегрузках и при просадках напряжения (до определенного предела).
Ниже вы видите условное обозначение на схеме синхронной машины.

Конструкция ротора
Как и любой другой, синхронный электродвигатель состоит из двух основных частей:
- Статор. В нём расположены обмотки. Его еще называют якорем.
- Ротор. На нём устанавливают постоянные магниты или обмотку возбуждения. Его также называют индуктором, из-за его предназначения — создавать магнитное поле).
Для подачи тока в обмотку возбуждения на роторе устанавливают 2 кольца (так как возбуждение постоянным током, на одно из них подают «+», а на другое «—»). Щетки закреплены на щеткодержателе.

Роторы у синхронных электродвигателей переменного тока бывают двух типов, в зависимости от назначения:
- Явнополюсные. Четко видны полюса (катушки). Используют при малых скоростях и большом числе полюсов.
- Неявнополюсные – выглядит как круглая болванка, в прорези на которой уложены провода обмоток. Используют при больших скоростях вращения (3000, 1500 об/мин) и малом числе полюсов.

Пуск синхронного двигателя
Особенностью этого вида электрических машин является то, что его нельзя просто подключить к сети и ожидать его запуска. Кроме того, что для работы СД нужен не только источник тока возбуждения, у него и достаточно сложная схема пуска.

Запуск происходит как у асинхронного двигателя, а для создания пускового момента кроме обмотки возбуждения на роторе размещают и дополнительную короткозамкнутую обмотку «беличью клетку». Её еще называют «демпфирующей» обмоткой, потому что она повышает устойчивость при резких перегрузках.
Ток возбуждения в обмотке ротора при пуске отсутствует, а когда он разгоняется до подсинхронной скорости (на 3-5% меньше синхронной), подаётся ток возбуждения, после чего он и ток статора совершает колебания, двигатель входит в синхронизм и выходит на рабочий режим.
Для ограничения пусковых токов мощных машин иногда уменьшают напряжение на зажимах обмоток статора, подключив последовательно автотрансформатор или резисторы.
Пока синхронная машина запускается в асинхронном режиме к обмотке возбуждения подключаются резисторы, сопротивление которых превышает сопротивление самой обмотки в 5 — 10 раз. Это нужно чтобы пульсирующий магнитный поток, возникающий под действием токов, наводимых в обмотке при пуске, не замедлял разгон, а также чтобы не повредить обмотки из-за индуцируемыми в ней ЭДС.
Видов таких машин очень много, выше была описана конструкция синхронного электродвигателя переменного тока с обмотками возбуждения, как самого распространенного на производстве. Есть и другие типы, такие как:
- Синхронные двигатели с постоянными магнитами. Это различные электродвигатели, такие как PMSM – permanent magnet synchronous motor, BLDC – Brushless Direct Current и прочие. Отличия, между которыми, состоят в способе управления и форме тока (синусоидальная или трапецивиденая). Их еще называют бесколлекторными или бесщеточными двигателями. Используются в станках, радиоуправляемых моделях, электроинструменте и т.д. Они работают не напрямую от постоянного тока, а через специальный преобразователь.
- Шаговые двигатели — синхронные бесщеточные двигатели, у которых ротор точно удерживает заданное положение, их используют для позиционирование рабочего инструмента в ЧПУ станках и для управления различными элементами автоматических систем (например, положение дроссельной заслонки в автомобиле). Состоят из статора, в этом случае на нём расположены обмотки возбуждения, и ротора, который выполнен из магнито-мягкого или магнито-твёрдого материала. Конструктивно очень похожи на предыдущие типы.
- Реактивные.
- Гистерезисные.
- Реактивно-гистерезисные.
Последние три типа СД также не имеют щеток, они работают за счет особой конструкции ротора. У реактивных СД различают три их конструкции: поперечно-расслоенный ротор, ротор с явновыраженными полюсами и аксиально-расслоенный ротор. Объяснение принципа их работы достаточно сложно, и займет большой объём, поэтому мы опустим его. Такие электродвигатели на практике вы, скорее всего, встретите нечасто. В основном это маломощные машины, используемые в автоматике.

Сфера применения
Синхронные двигатели стоят дороже чем асинхронные, к тому же требуют дополнительного источника постоянного тока возбуждения – это отчасти снижает ширину области применения этого вида электрических машин. Однако, синхронные электродвигатели используют для привода механизмов, где возможны перегрузки и требуется точное поддерживание стабильных оборотов.

При этом чаще всего используются в области больших мощностей — сотен киловатт и единиц мегаватт, и, при этом, пуск и остановка происходят достаточно редко, то есть машины работают круглосуточно долгое время. Такое применение обусловлено тем, что синхронные машины работают с cosФи приближенном к 1, и могут выдавать реактивную мощность в сеть, в результате чего улучшается коэффициент мощности сети и снижается её потребление, что важно для предприятий.
Преимущества и недостатки
Если говорить простыми словами, то у любой электрической машины есть свои плюсы и минусы. У синхронного двигателя положительными сторонами является:
- Работа с cosФи=1, благодаря возбуждению постоянным током, соответственно они не потребляют реактивной мощности из сети.
- При работе, с перевозбуждением отдают реактивную мощность в сеть, улучшая коэффициент мощности сети, падение напряжения и потери в ней и повышается КМ генераторов электростанциях.
- Максимальный момент, развиваемый на валу СД, пропорционален U, а у АД — U² (квадратичная зависимость от напряжения). Это значит, что у СД хорошая нагрузочная способность и устойчивость работы, которые сохраняются при просадке напряжения в сети.
- В следствие всего этого скорость вращения стабильна при перегрузках и просадках, в пределах перегрузочной способности, особенно при повышении тока возбуждения.
Однако существенным недостатком синхронного двигателя является то, что его конструкция сложнее, чем у асинхронных с КЗ-ротором, нужен возбудитель, без которого он не сможет работать. Всё это приводит к большей стоимости по сравнению с асинхронными машинами и сложностями в обслуживании и эксплуатации.
Пожалуй, на этом достоинства и недостатки синхронных электродвигателей заканчиваются. В этой статье мы постарались кратко изложить общие сведения о синхронных электродвигателях. Если у вас есть чем дополнить материал – пишите в комментариях.
